

 153
153 7
7当汽车不再需要司机,城市会变成什么样?本期,我们邀请SRC街景研究中心的钱志强,聊聊L2到L5的技术跃迁如何重塑街道、停车场与我们的生活方式:从算法控制的路权分配到量子城市的想象,在"技术解放"与"数据监控"的张力之间,重新思考人与城市的关系。当算法开始决定路权,当数据开始引导生活,当“开车”变成“被运送”——你愿意交出那个方向盘吗?
🌟 你会听到
- L2到L5:自动驾驶到底分几级?现在走到哪一步了?
- 三条路线:特斯拉视觉/英伟达开源/车路协同 谁代表未来?
- 亦庄初体验:没有安全员的自动驾驶,坐起来是什么感觉?
- 消失的停车场:当汽车不再需要停,城市空间会被如何释放?
- 量子城市vs智慧城市:数据驱动的生活,是自由还是可控?
- 未来预言:交出方向盘之后,我们真的会更幸福吗?
⏰ 录制时间
北京时间:2026/03/04 下午 4: 00-6: 00
🎙️ 本期嘉宾
志强
SRC街景研究中心副秘书长小红书:@SRC街景研究中心
🎧 主播
锦澜
小红书:@锦澜的奇幻漂流
INS:@Jinlannn42
雨山
小红书:@花木鱼没有主义
公众号:@自流地TheFlow
⏳ 时间轴
00:00 - 02:46 引言:自动驾驶与城市空间的未来想象
- 从"口袋公园+充电装置+小巴停靠"的融合场景切入,探讨技术如何重塑城市治理与日常生活的互动方式
- 核心张力:技术进步带来的是"自由"还是"可控"?
- L1-L5分级体系详解:从辅助驾驶到完全无人驾驶的跃迁
- 当前格局:主流技术卡在L2强化版(接近L4体验,但法律责任仍归驾驶员);L3成本高、限制多,发展缓慢;L4已实现但困于"地理围栏"
- 关键预测:2026年或成L4爆发节点,6G基建是规模化前提;未来可能直接从L2跳跃至L4,跳过尴尬的L3阶段
- 特斯拉FSD模式:纯视觉方案,低成本、高效率,适合私有化普及,但安全系数略低
- 英伟达/英特尔开源模式:AR1开源模型赋予"可解释决策能力",打破封闭系统垄断,加速行业迭代,但依赖高性能芯片
- 车路协同模式(萝卜快跑):雷达+高精地图,追求特定区域内"绝对安全",适合共享出行,但成本高昂难以普及
- 关键矛盾:算力霸权 vs 算法创新(蒸馏算法可能打破硬件依赖);仿真测试 vs 真实世界验证
- 亦庄园区实践:L4级Robot Taxi无需安全员,乘坐体验平稳,技术成熟度高,但公众信任建立仍需时日
- 萝卜快跑困境:用户接受度与就业冲突的双重挑战;自动驾驶试点在降低成本的同时,逐步改变社会意识
- 数据主权:马斯克全球建厂收集本地数据的策略;特斯拉FSD V14入华面临的数据安全限制与本地化需求
38:51 - 48:23 变革:从私家车到共享出行,再到城市空间重构
- 私家车消亡趋势:大城市私家车已成"负资产",共享无人驾驶普及后,个人或不再需要拥有车辆
- 空间释放:停车场(占城市用地约30%)和高架桥将被大量释放,转化为绿地、公共空间
- 路权重构:从"汽车主导"转向"自行车/步行主导",街道功能回归社交与商业
- 案例:北京土地利用优化、首尔清溪川项目
- 量子城市 vs 智慧城市:前者"数据引导生活",后者"以人为本";中国优势在于数字基建与政府主导的数据安全,但隐私保护仍是挑战
- 生活方式变革:车道减少、绿地增多;通勤时间转化为自由时间,提升幸福感;车内空间成为移动办公/休闲场景
- 深圳样本:已展现L5级潜力,可能彻底改变年轻人生活方式,激发社会进步
56:01 - 结尾 核心追问:自由还是可控?
- 当算法能够优化城市运行效率,人类是否愿意让渡部分自由换取便利与安全?
- 技术乐观(解放时间、重塑空间)vs 批判视角(算法控制、隐私风险、就业冲击)
🔍 补充资料
1. SAE J3016自动驾驶分级标准(2024更新版)
国际汽车工程师学会(SAE International)与国际标准化组织(ISO)联合发布的J3016标准,2024年更新后明确将L0-L2级系统命名为"驾驶员辅助系统",L3-L5级称为"自动驾驶系统"。
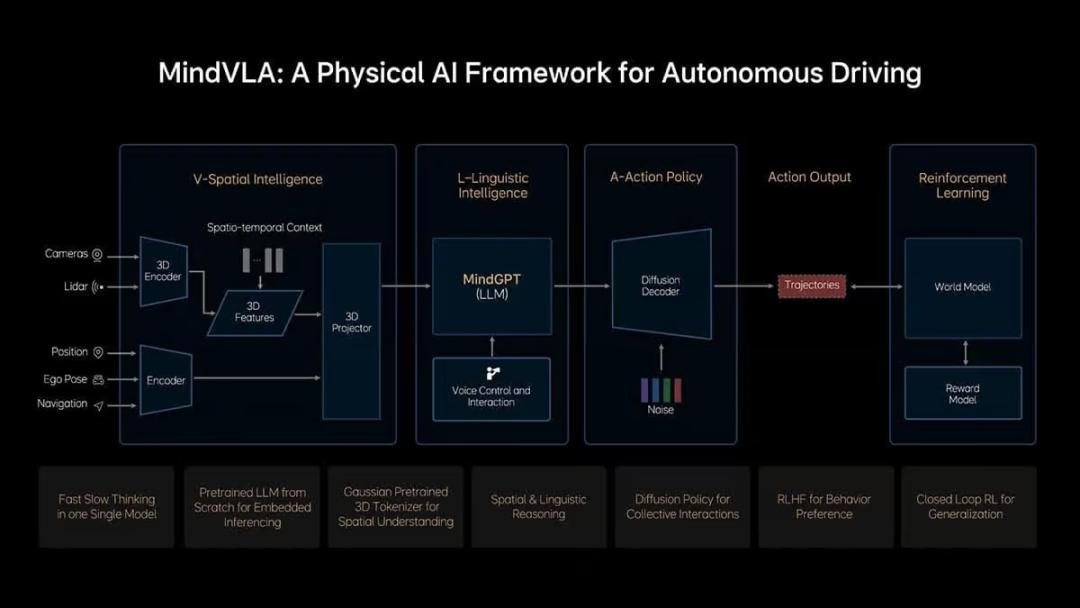
2. 特斯拉FSD V14
2025年10月发布的最新版本(非播客中提到的1月),采用端到端神经网络架构,参数量较V13提升4.5-10倍,融合xAI Grok赋予模型常识推理和预判能力。
特斯拉FSD使用的VLA模型©️ 36氪,Tesla's latest technology sharing: the core architecture of FSD is exposed.
3. 英伟达NVIDIA DRIVE Alpamayo-R1(AR1)
2025年12月1日,英伟达在NeurIPS 2025大会上发布DRIVE Alpamayo-R1(播客中提及的"AR-One"),全球首个专为自动驾驶研究设计的开源推理型视觉语言动作模型(VLA)。
重要修正:播客中"英特尔AR-One"为口误,实际应为英伟达(NVIDIA)Alpamayo-R1(简称AR1)。
核心技术特征:
- 思维链推理(Chain-of-Thought):执行动作前生成中间"思考过程",可检查推理链条而非仅看输入输出,解决"黑盒"不透明问题
- 白盒可解释性:能解释每项决策背后的逻辑,如"检测到行人抬手示意,推断其要过街,故停车让行"
- 技术规格:100亿参数,99ms实时延迟,基于Cosmos-Reason框架构建
- 配套资源:发布1727小时驾驶数据集(覆盖25个国家,规模约为Waymo开放数据集的3倍)及AlpaSim开源仿真框架
英伟达DRIVE Alpamayo-R1架构©️ NVIDIA,research.nvidia.com
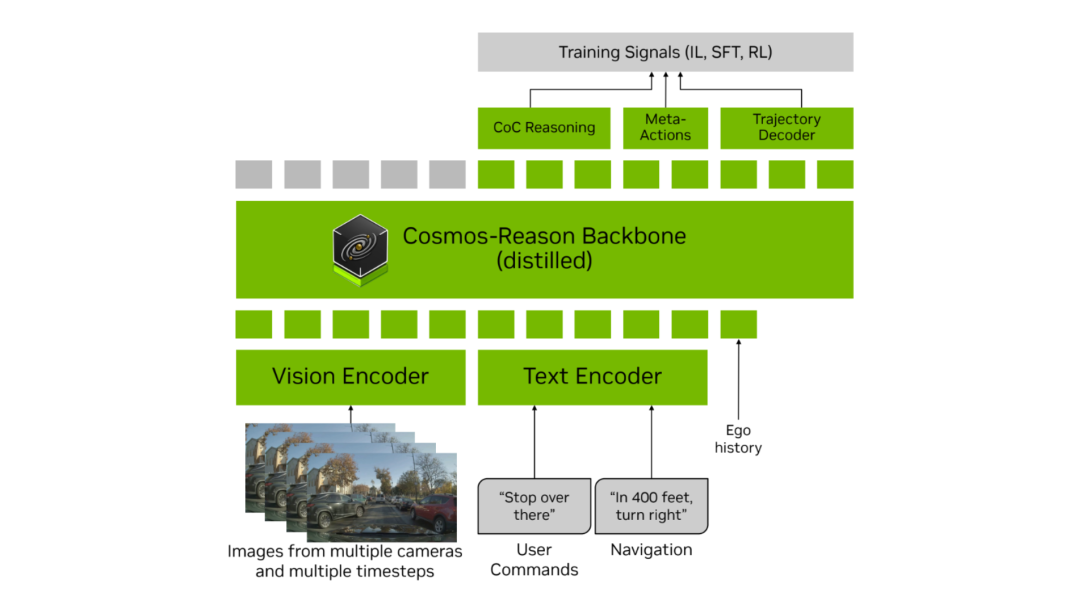
播客概念验证:播客中提到的"白盒模式""思维链推理""打破特斯拉封闭生态"等描述均准确对应Alpamayo-R1的技术特征。黄仁勋称其为"物理AI的ChatGPT时刻"。
4. 百度萝卜快跑(Apollo Go)
百度旗下自动驾驶出行服务平台,2021年8月上线,采用L4级"车路云一体化"技术路线。截至2025年,已在全球22座城市运营,累计订单超1700万次,全无人驾驶里程达1.4亿公里。
数据更新:播客中"武汉车队约400台"为2024年数据,2025年已扩展至1000辆第六代无人车;单车成本从48万元降至20.46万元,较第五代下降60%。2025年11月数据显示,武汉全无人订单每周已超25万单。
5. 北京亦庄高级别自动驾驶示范区
全球首个"车路云一体化"高级别自动驾驶示范区,2020年9月启动建设,覆盖600平方公里,建成1600多个"智慧路口",累计测试里程超3800万公里。
技术细节:示范区部署"多感合一"检测相机,实现绿波通行与路口动态优化,区域车均延误下降30.1%,车辆平均速度提升45%。2024年发布全国首个"车路云数据协同平台"。
北京亦庄云控平台,实时监管自动驾驶车辆运行状态©️ 北京亦庄官方发布

6. 首尔清溪川复原工程
2003年7月至2005年10月,首尔拆除清溪川高架桥(长5.84公里),复原自然河道,总投入3900亿韩元(约31.2亿元人民币)。开放后两年接待游客6200万人次,鱼类种类从4种恢复至25种,沿岸写字楼租金上涨35%。
清溪川复原前后对比,从高架桥到生态走廊 ,来源:原网页

7. 德国弗莱堡可持续交通转型
德国弗莱堡市(Freiburg im Breisgau)通过四次"交通总体规划"(1960s-2000s),从汽车主导转向可持续交通系统,历史城区几乎皆为步行区,有轨电车、自行车和步行者共享街道,获欧洲"短距离交通奖"。
弗莱堡街道 来源: How Freiburg went car-free

8. 上海"量子城市"
2023年底首次披露概念,2025年7月发布《上海城市空间治理领域人工智能应用暨量子城市空间智能建设实施方案(2026—2027年)》,杨浦区复兴岛为实验基地。
核心概念:"量子城市"并非应用量子物理技术,而是借用"量子纠缠"概念描述实体城市与数字孪生城市的深度耦合,核心工具为"云宇星空"行业基座大模型,覆盖1.7万平方公里国土面积。
上海复兴岛量子城市时空创新实验基地©️ 上海市规划和自然资源局,在复兴岛,“数字智能岛”不再是科幻……

📻 收听平台
音频:小宇宙|苹果播客|Spotify
视频:Bilibili|YouTube 搜索「第五立面」
🎵 延伸提及
- 技术企业:特斯拉(Tesla)、百度(Apollo/萝卜快跑)、华为(ADS)、小米、小马智行、Waymo、英伟达(NVIDIA/Alpamayo)、英特尔(Intel/OpenBot)
- 技术概念:SAE J3016分级、端到端神经网络(End-to-End)、视觉语言动作模型(VLA)、思维链推理(Chain-of-Thought)、车路云一体化(V2X)、交通宁静化(Verkehrsberuhigung)、数字孪生
- 城市项目:北京亦庄高级别自动驾驶示范区、武汉智能网联汽车测试区、上海量子城市(复兴岛)、首尔清溪川复原工程、德国弗莱堡可持续交通
- 政策文件:SAE J3016: 2024、北京市自动驾驶汽车条例、上海市量子城市建设实施方案(2026-2027)
- 学术机构:SRC街景研究中心、国家智能网联汽车创新中心、上海数字城市规划研究中心
🙏 特别鸣谢
录音支持:荔枝APP·北京安贞门录音棚
订阅即登岛,我们下期再会!



