

 4
4 0
0- 标题: PointNet: Deep Learning on Point Sets for 3D Classification and Segmentation
- 作者: Charles R. Qi, Hao Su, Kaichun Mo, Leonidas J. Guibas
- arXiv ID: 1612.00593v2
- 日期: 2016-12-02
概要:PointNet 提出了一种直接输入原始点云的统一神经网络架构,通过"独立特征变换 + 对称聚合"的核心策略解决点云无序性问题,利用空间变换网络(T-Net)实现坐标对齐,并采用局部-全局特征融合机制同时支撑分类与分割任务。该架构避免了传统体素化方法的数据冗余和量化损失,以线性复杂度实现了高效的 3D 深度学习。
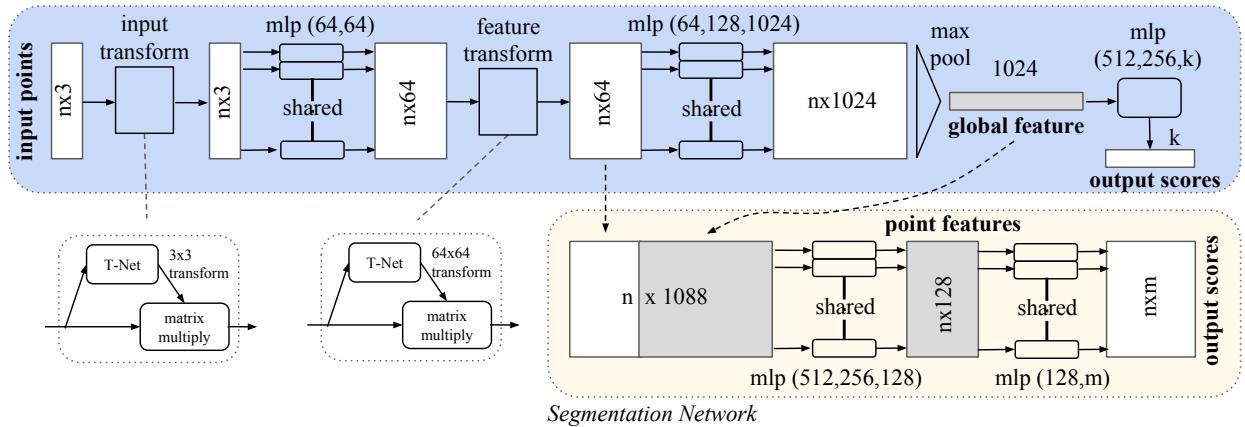
主干流程:
- 输入点云经 T-Net 进行空间坐标对齐
- 共享 MLP 独立提取逐点局部特征
- Max Pooling 对称聚合为全局特征向量
- 全局特征与局部特征拼接(分割任务)
- 输出分类分数或逐点分割标签
声明:本节目论文解析与语音合成均由 AI 完成;解析内容基于本期解读时,该论文在 arXiv 上公开的对应版本;其中所有涉及原论文的图、数据均引用自原论文,如涉及侵权,请及时联系删除;AI 解读难免存在错误遗漏,如有发现欢迎联系修改;如需深入研究,建议阅读原文。
