

 1
1 0
0- 标题: VoxelNet: End-to-End Learning for Point Cloud Based 3D Object Detection
- 作者: Yin Zhou, Oncel Tuzel
- arXiv ID: 1711.06396v1
- 日期: 2017-11-17
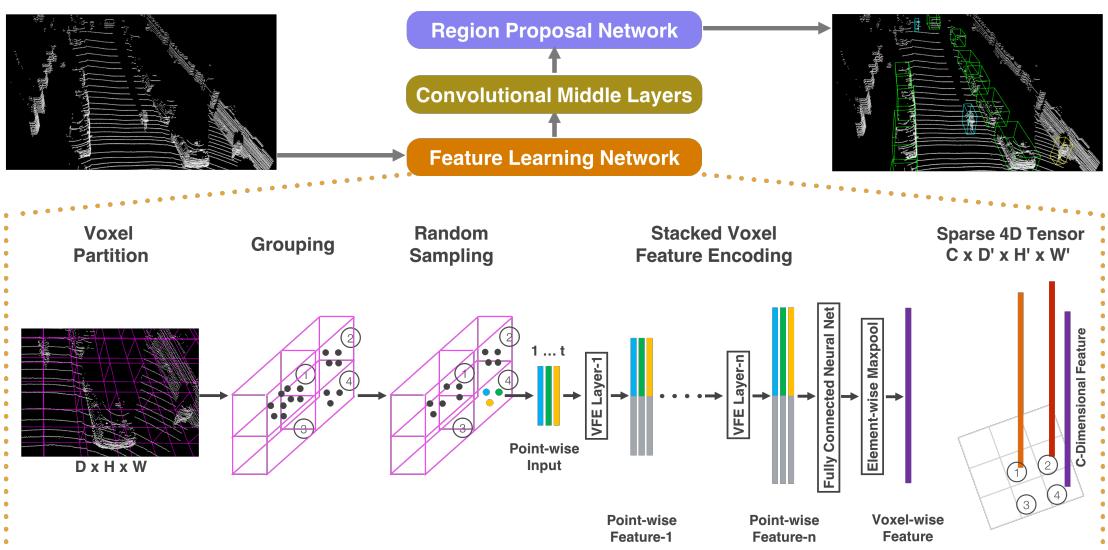
概要:VoxelNet提出了一种端到端的3D目标检测架构,彻底消除了对手工设计特征的依赖。该方法通过将稀疏点云划分为均匀3D体素,利用新颖的Voxel Feature Encoding (VFE)层将体素内点群转换为统一的特征表示,形成规则且描述性强的稀疏4D张量;随后通过3D卷积网络聚合空间上下文信息,最后接入区域提议网络(RPN)直接生成3D边界框预测,实现了从原始点云到检测结果的单阶段端到端训练。
主干流程:
- 体素化与特征编码:将原始点云空间划分为均匀 3D 体素,通过 VFE 层提取体素内几何特征,构建描述性的稀疏 4D 张量表示
- 卷积中间层处理:对稀疏 4D 张量应用 3D 卷积操作,逐步聚合邻域体素特征以扩大感受野,捕获丰富的空间上下文信息
- 区域提议网络检测:基于多尺度融合特征图,通过全卷积结构并行输出前景/背景分类分数和3D边界框回归参数
声明:本节目论文解析与语音合成均由 AI 完成;解析内容基于本期解读时,该论文在 arXiv 上公开的对应版本;其中所有涉及原论文的图、数据均引用自原论文,如涉及侵权,请及时联系删除;AI 解读难免存在错误遗漏,如有发现欢迎联系修改;如需深入研究,建议阅读原文。
