

 0
0 0
0标题: PointRCNN: 3D Object Proposal Generation and Detection from Point Cloud
作者: Shaoshuai Shi, Xiaogang Wang, Hongsheng Li
arXiv ID: 1812.04244v2
日期: 2018-12-11
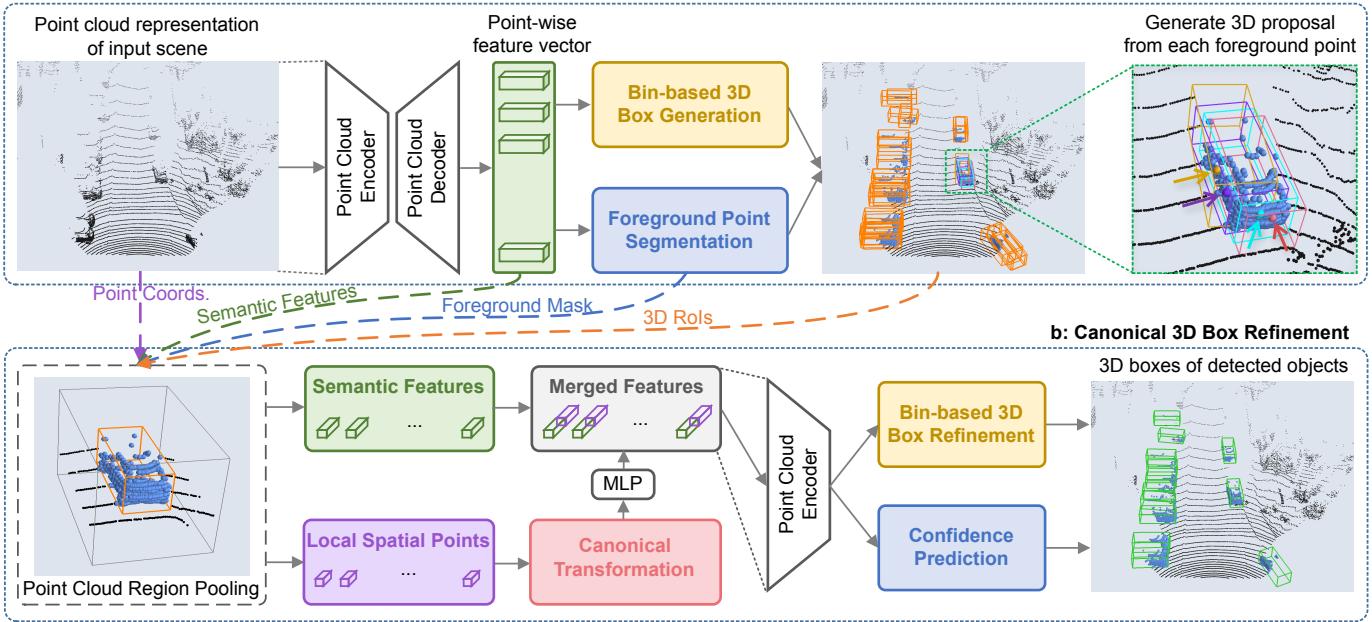
概要:PointRCNN 采用两阶段架构直接从原始点云进行 3D 目标检测。第一阶段通过 PointNet++ 提取点特征并分割前景点,以自下而上方式生成高质量 3D 候选框,避免了传统投影到鸟瞰图或体素化带来的信息损失,也无需在3D空间密集铺设锚框;第二阶段将候选框内的点云池化并转换到规范坐标系,融合局部几何特征与第一阶段的全局语义特征,实现精确的框回归和置信度预测。
主干流程:
点云特征编码与前景分割:利用 PointNet++ backbone 提取点级语义特征,通过分割头将场景点云判别为前景点和背景点
3D候选框生成:基于前景点采用 bin-based 回归策略预测中心位置、尺寸和朝向参数,经NMS筛选生成少量高质量候选框
规范坐标系变换与池化:对每个候选框进行点云区域池化,将点坐标转换到以候选框中心为原点、朝向为X轴的局部规范坐标系
特征融合与框精修:融合局部空间特征(变换后坐标、反射强度等)与Stage-1全局语义特征,预测框参数残差并评估置信度
声明:本节目论文解析与语音合成均由 AI 完成;解析内容基于本期解读时,该论文在 arXiv 上公开的对应版本;其中所有涉及原论文的图、数据均引用自原论文,如涉及侵权,请及时联系删除;AI 解读难免存在错误遗漏,如有发现欢迎联系修改;如需深入研究,建议阅读原文。
