

 0
0 0
0标题: PointPillars: Fast Encoders for Object Detection from Point Clouds
作者: Alex H. Lang, Sourabh Vora, Holger Caesar, Lubing Zhou, Jiong Yang, Oscar Beijbom
arXiv ID: 1812.05784v2
日期: 2018-12-14
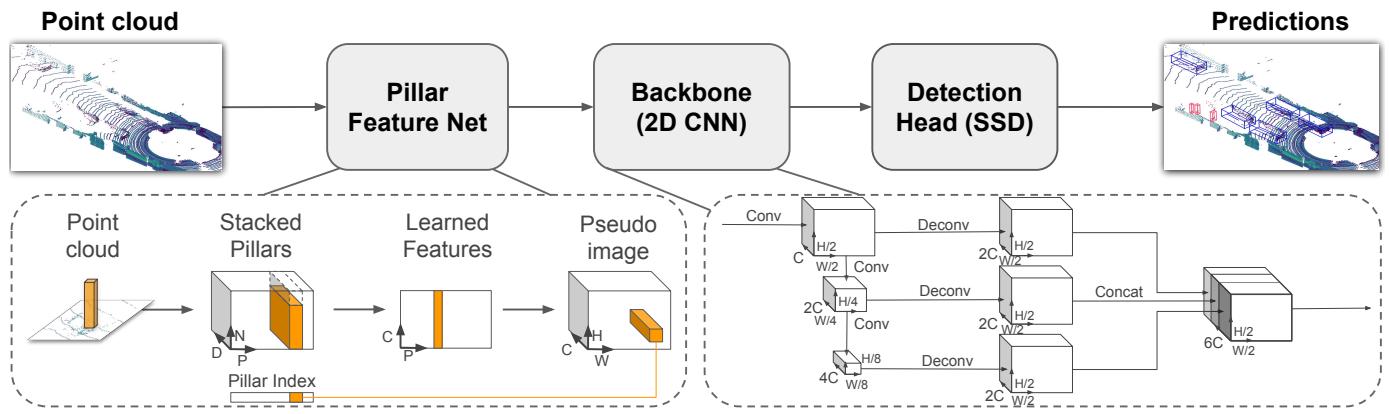
概要:PointPillars 提出了一种将稀疏 3D 点云编码为稠密 2D 伪图像的新方法,通过垂直柱(pillars)组织点云并用 PointNet 学习特征,使后续全部计算转化为高效的 2D 卷积,在保持高精度的同时实现 62-105 Hz 的实时推理。该方案解决了传统方法中固定编码器精度不足、学习型编码器速度过慢的两难困境。
主干流程:
将原始点云转换为垂直柱(pillars)并通过 PointNet 编码为伪图像特征
利用 2D 卷积骨干网络提取多尺度高级表征
通过 SSD 检测头直接回归 3D 边界框输出检测结果
声明:本节目论文解析与语音合成均由 AI 完成;解析内容基于本期解读时,该论文在 arXiv 上公开的对应版本;其中所有涉及原论文的图、数据均引用自原论文,如涉及侵权,请及时联系删除;AI 解读难免存在错误遗漏,如有发现欢迎联系修改;如需深入研究,建议阅读原文。
