

 2
2 0
0标题: PillarNeXt: Rethinking Network Designs for 3D Object Detection in LiDAR Point Clouds
作者: Jinyu Li, Chenxu Luo, Xiaodong Yang
arXiv ID: 2305.04925v1
日期: 2023-05-08
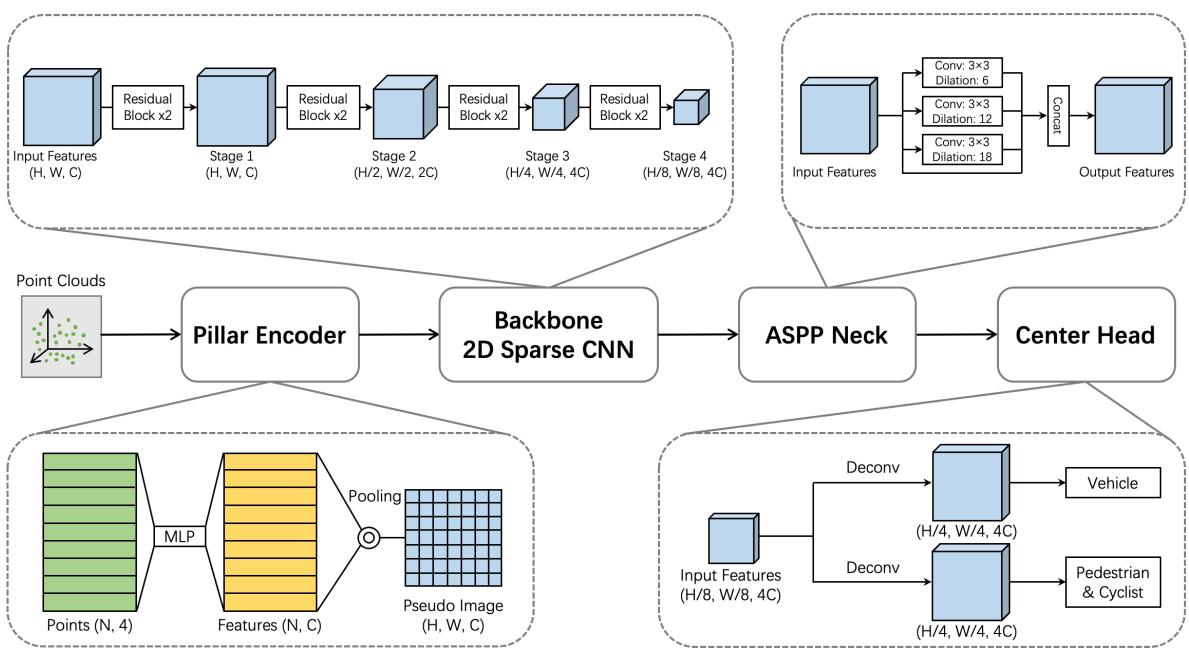
概要:PillarNeXt 重新审视 3D 目标检测中的计算资源分配,证明简单的 pillar 编码器配合现代化的 2D 检测架构设计(大感受野 neck、center-based head)即可达到 SOTA 性能,无需复杂的精细几何建模。整体方案采用点云 → pillar 网格化 → 稀疏 ResNet 主干 → ASPP neck → 多分组中心检测头的简洁流程,在 Waymo 和 nuScenes 上实现了精度与效率的最佳平衡。
主干流程:
点云 pillar 网格化:通过 MLP 和 max pooling 将原始点云转换为伪图像特征
稀疏 ResNet-18 主干:用稀疏 2D 卷积提取多层级抽象特征
ASPP 特征融合:扩大感受野,融合上下文信息
特征上采样:恢复空间分辨率,生成细粒度表征
多分组中心检测头:预测中心点热力图并回归 3D 边界框
声明:本节目论文解析与语音合成均由 AI 完成;解析内容基于本期解读时,该论文在 arXiv 上公开的对应版本;其中所有涉及原论文的图、数据均引用自原论文,如涉及侵权,请及时联系删除;AI 解读难免存在错误遗漏,如有发现欢迎联系修改;如需深入研究,建议阅读原文。
