

 34
34 2
2为什么最近大家都在关注灵巧手?
Sharpa灵巧手
从高端方案到低成本路线,寻找可量产解法
传统机械手的问题在哪里?
大减速比齿轮方案:力量足,但回驱性差
依赖力传感器:反馈存在延迟
面对人机交互、柔软物体、不规则物体时表现受限
这篇文章的创新点
Quasi-Direct-Drive(准直驱)
Impedance Control(阻抗控制)
Differential Mechanism(差动结构)
理论框架和机械结构
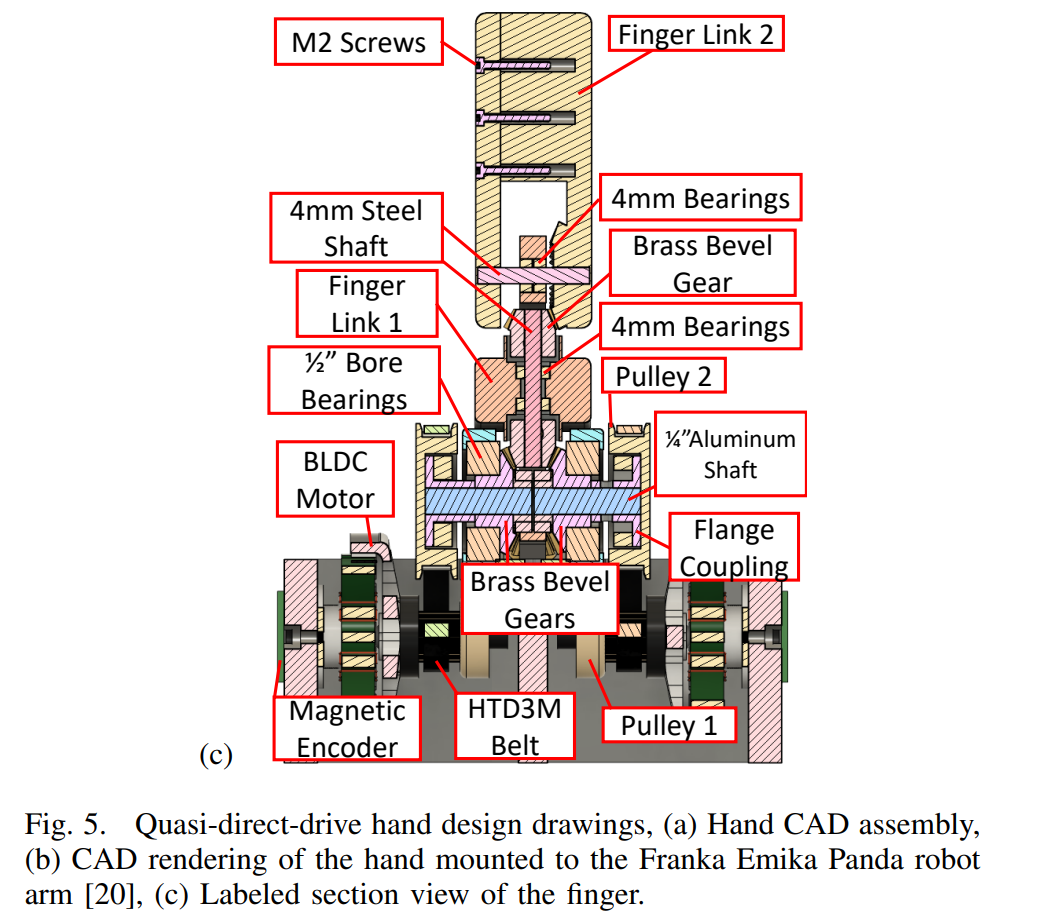
机械结构
两台电机驱动两根手指
使用差动齿轮结构分配扭矩
手部结构大量采用3D打印件
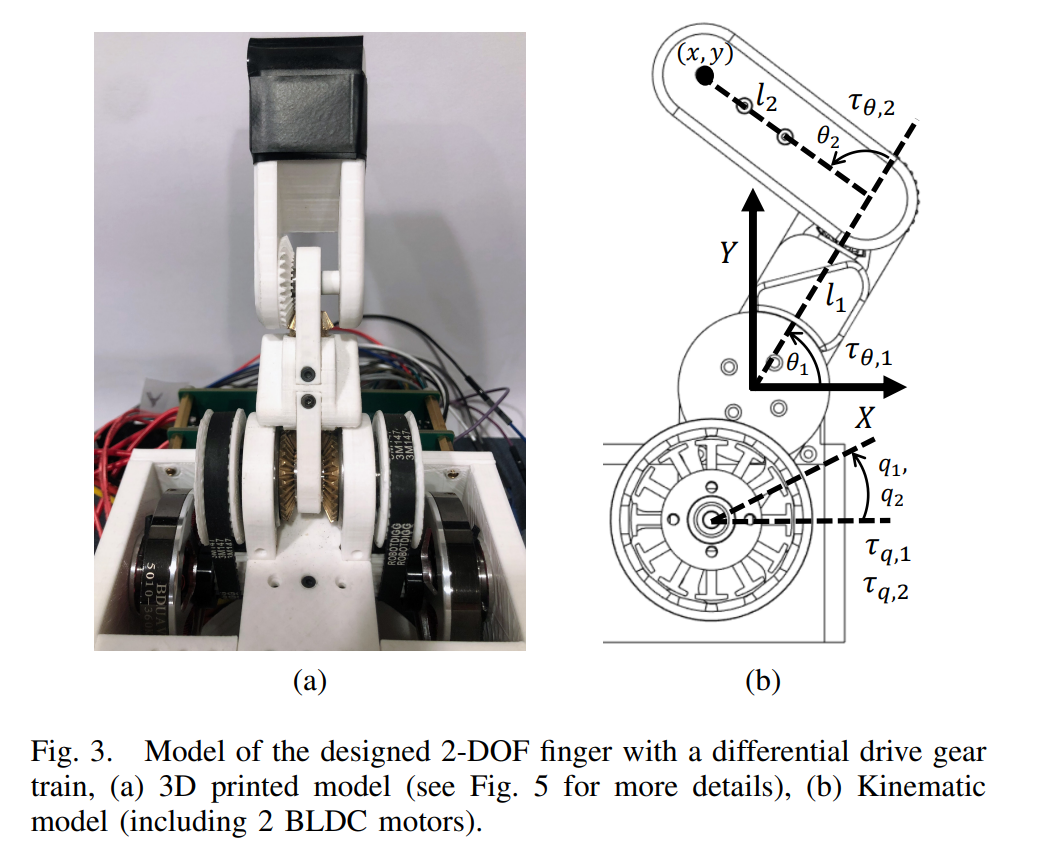
电机转动角度&关节转动角度映射关系
差动齿轮结构

指尖位置误差&关节扭矩映射关系
指尖阻抗控制
虚拟弹簧&阻尼

关节位置误差&关节扭矩映射关系
关节阻抗控制

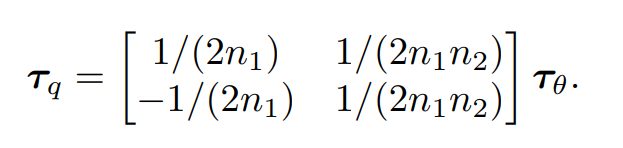
关节力矩&电机力矩映射关系
差动齿轮结构
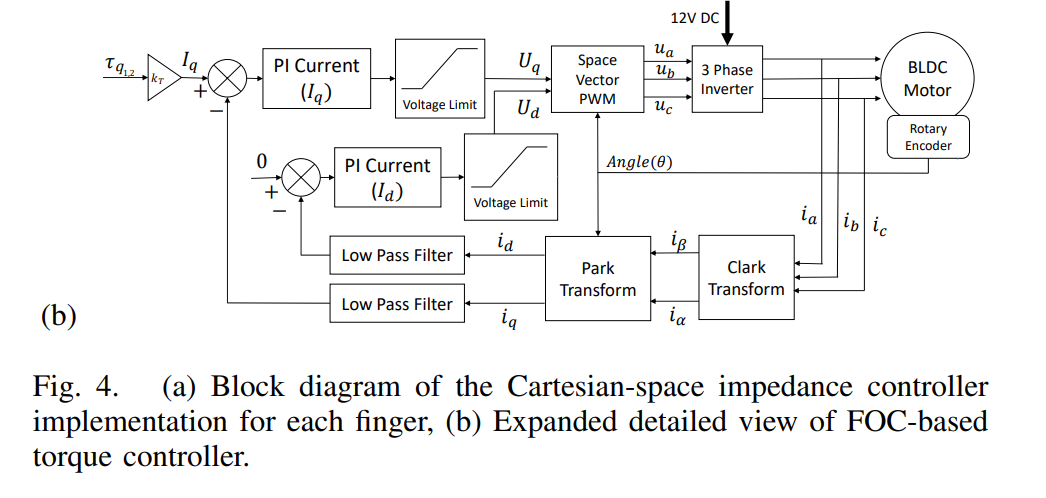
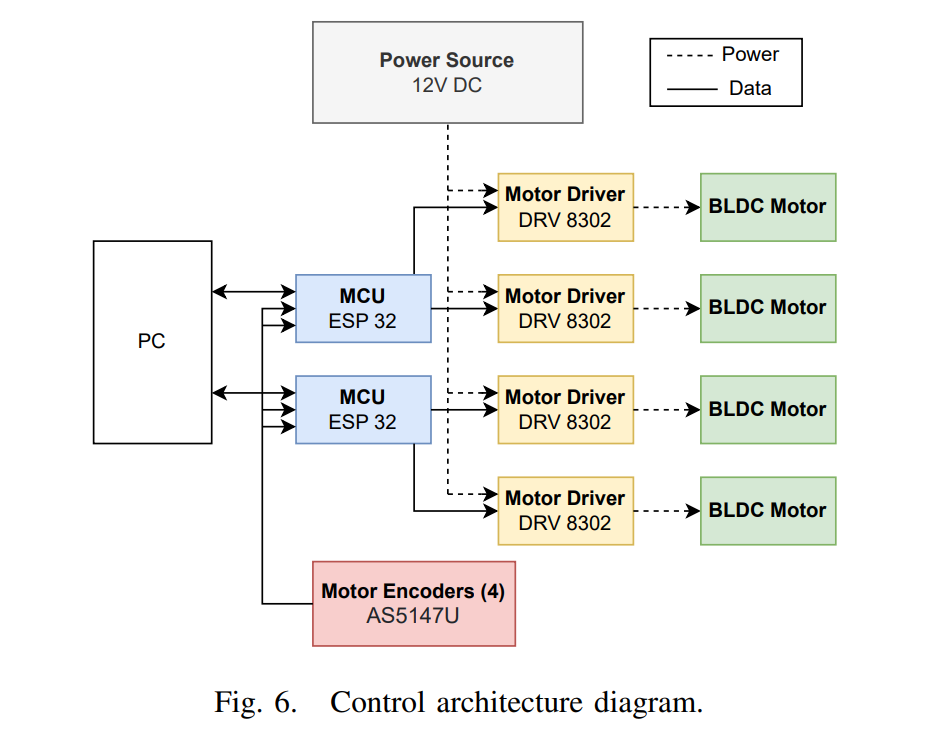
双层控制系统
外层控制:
根据目标指尖位置/关节角度
计算需要的关节力矩
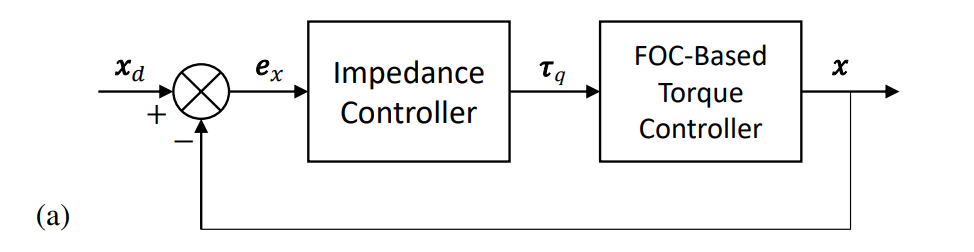
内层控制:
使用FOC磁场定向控制
精准调节电机电流
实现目标扭矩输出
方案实现效果
指尖输出力约 8.2N
受外界干扰时不易脱手
成本约 400美元
所以是非常有现实意义的开源方向~
为什么这样的技术路线值得关注呢
相比堆硬件的高端灵巧手,这种路线更像现实答案:
更低成本
更易量产
更适合机器人商业落地
控制思路先进
论文指路:Development of a Novel Impedance-Controlled Quasi-Direct-Drive Robotic Hand
大家有什么想法都可以再评论区讨论喔!!!


