

 27
27 5
5ORCA Hand 为什么火?
8小时完成组装 + 低成本 + 高灵巧度 + 长时间稳定运行
当前灵巧手有哪些路线?
绳驱:Shadow Hand,InMoov
直驱 / 准直驱方案:LEAP Hand
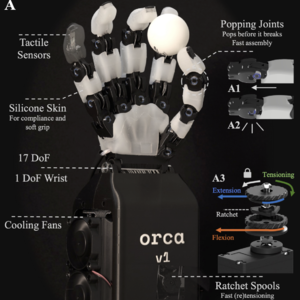
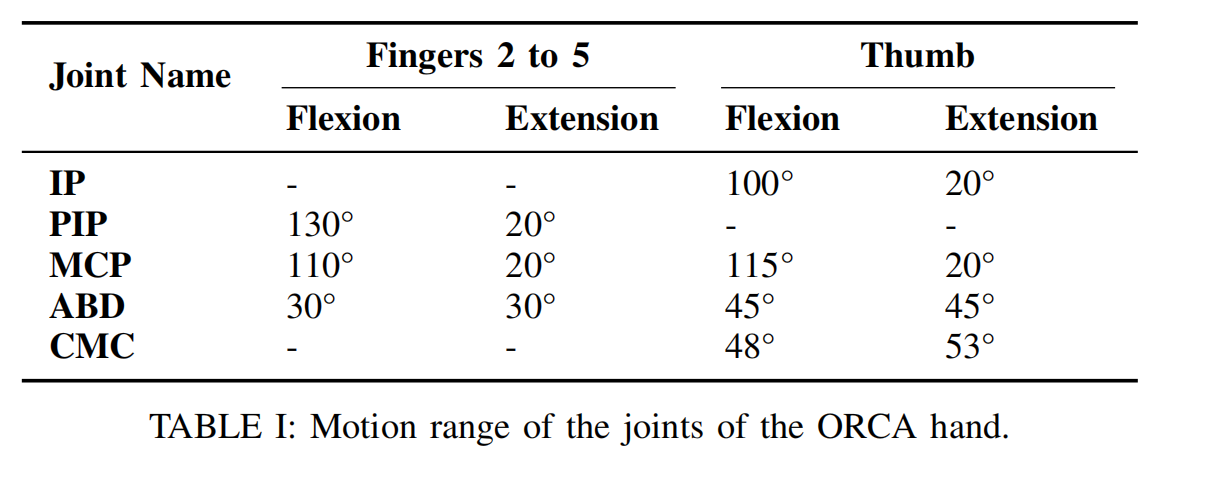
ORCA 的核心机械设计
全 3D 打印结构

棘轮式张力调节
金属导销
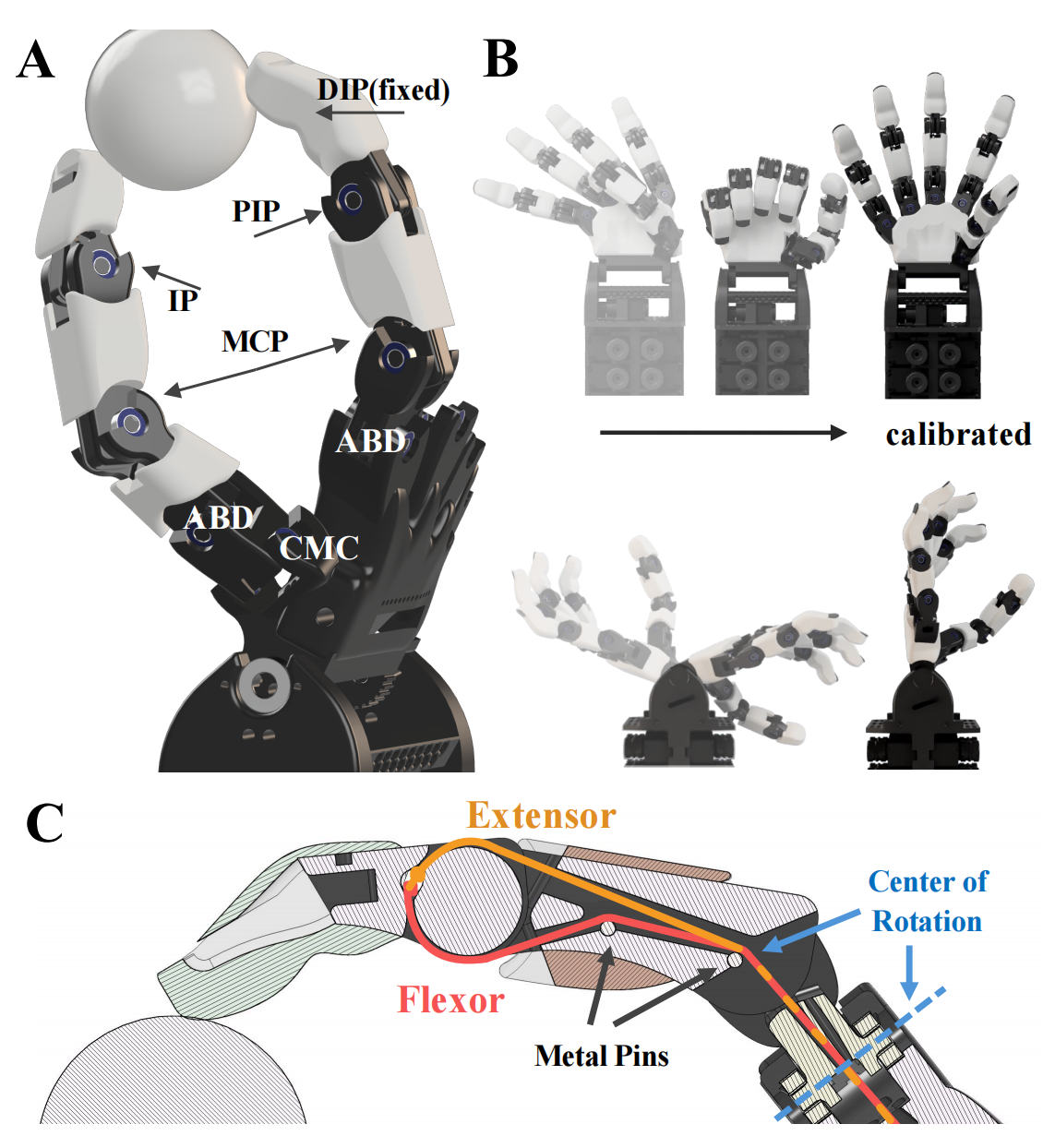
特氟龙导管
防撞关节 & 手指设计
可弹开式安全关节
取消最末端独立驱动
手腕 & 触觉方案
仅保留手腕屈伸自由度
使用同步带而非 tendon 驱动
触觉使用 FSR 压力传感器:只检测:“是否接触”,而不是精准测力
ORCA 最有意思的部分:自动标定
没有额外角度传感器
重新计算手指关节角度&电机角度的比例系数
春天到啦啦啦,大家要出门踏踏青喔!!!看我拍的fafa



